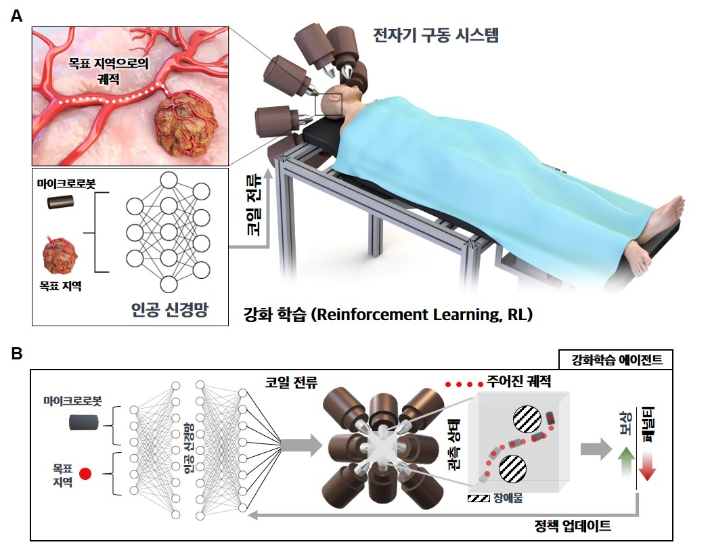
 연구성과 개요도. 한국연구재단 제공
연구성과 개요도. 한국연구재단 제공복잡한 수학적 계산 없이 의료용 마이크로로봇을 인체 내에서 정밀하게 제어할 수 있는 새로운 구동 방법이 개발됐다.
한국연구재단은 대구경북과학기술원(DGIST) 최홍수 교수 연구팀이 강화학습 기반의 인공신경망을 활용해 자성 마이크로로봇의 3차원 위치를 자동 정밀 제어할 수 있는 방법을 개발했다고 12일 밝혔다.
외부 전자기 구동 시스템에서 생성되는 자기장과 자기력으로 무선 제어되는 자성 마이크로로봇은 인체 내에 치료 인자를 전달하는 정밀 표적 치료에 활용할 수 있다. 하지만 혈관·종양 등과 같은 인체 내 동적 환경에서 마이크로로봇을 목표 위치까지 구동시키기 위해서는 복잡한 모델링이나 수학적 계산이 필요하다.
이에 따라 연구팀은 복잡한 수학적·물리적 모델링 없이도 다양한 형태의 마이크로로봇을 제어할 수 있는 범용적 방법으로 강화학습 기반 인공신경망을 개발하는데 성공했다.
이 인공신경망은 전자기 구동 시스템에 전류를 직접 전달하는 방식으로 마이크로로봇을 구동, 3차원 정밀 위치 제어법을 스스로 터득했다.
학습된 인공신경망을 활용한 결과, 마이크로로봇이 기존 제어 방식보다 50%가량 빠른 속도로 목표 위치에 도달했다고 연구팀은 설명했다.
또 약 40% 더 적은 위치 오차를 보였다고 덧붙였다.
최홍수 교수는 "적은 시간과 자원으로 다양한 형태의 마이크로로봇과 전자기 구동 시스템에 적용될 수 있는 범용적인 구동 체계가 될 것으로 기대한다"고 말했다.
이번 연구 성과는 인공지능 분야 국제학술지 '네이처 머신 인텔리전스'에 지난 11일 실렸다.